Diagramas de Flujo
Desafío sin Obstáculos
Versión 1: Empleada en el Prototipo 1, 2 y 3
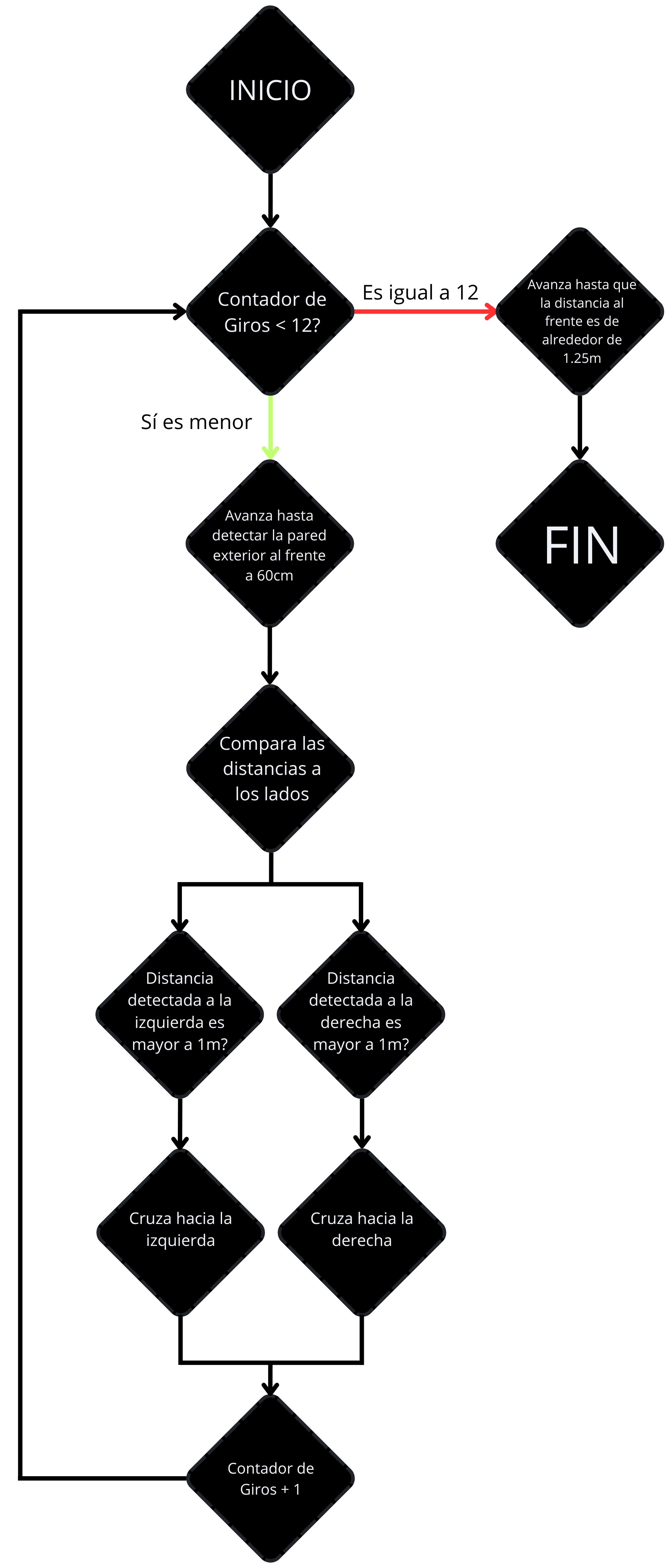 Versión 1 del diagrama de Flujo del Desafío sin Obstáculos
Versión 1 del diagrama de Flujo del Desafío sin Obstáculos
Como se puede apreciar, Klevor siempre intenta cumplir una serie de pasos:
- Al iniciar la ronda, Klevor avanza hasta que detecte que la pared esté a 60 cm de distancia o menos al frente, para poder empezar a girar asi que, empieza a comparar con el RPLiDAR C1 con los ángulos que están a su izquierda y su derecha (por ejemplo un promedio de los ángulos de 175° a 185° para saber la distancia por la cual está separado por la pared a la izquierda) para saber hacia dónde girar.
- Mientras está girando, empieza a leer los datos del giroscopio, cuando detecte que su orientación ha cambiado al menos 90° con respecto a como inició a girar, empieza a avanzar hacia adelante, sumándole 1 a su contador de giros, en caso contrario, es decir, que no ha girado 90°, simplemente sigue girando.
- Tras completar los 12 giros, Klevor simplemente avanza hasta que detecte que la distancia al frente sea de alrededor de 1.25 m, tras esto simplemente para.
Desafío con Obstáculos
Versión 1: Empleada en el Prototipo 1, 2 y 3
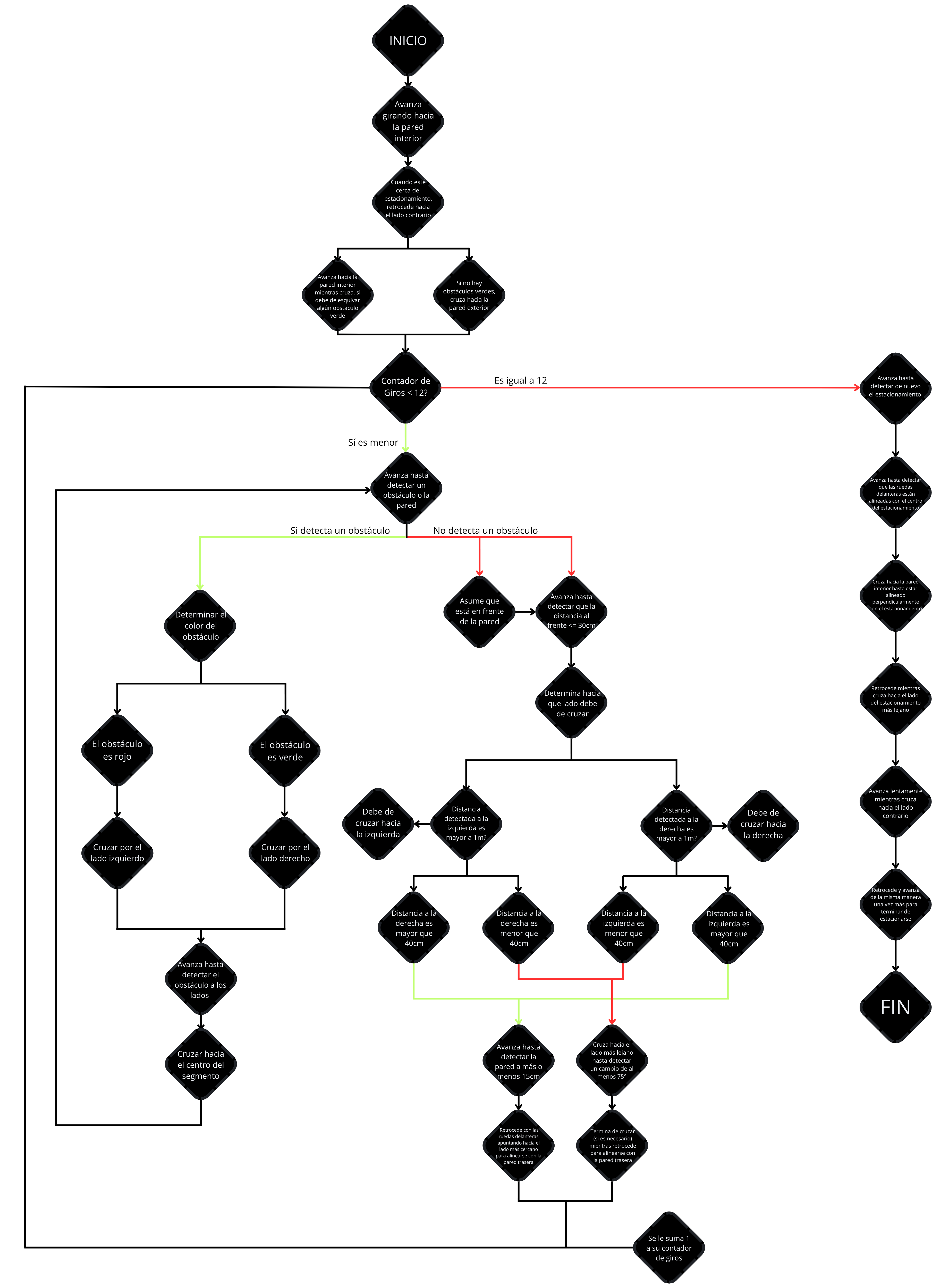 Versión 1 del diagrama de Flujo del Desafío con Obstáculos
Versión 1 del diagrama de Flujo del Desafío con Obstáculos